

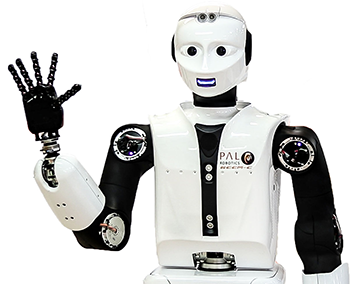
Este estudio trata sobre la plataforma de investigación en robótica humanoide bípeda de tamaño humano, REEM-C. Es un miembro de una familia de robots que se usan para diversas aplicaciones. La gama REEM-C proporciona una base totalmente adaptable para la investigación en áreas tan apasionantes como navegación, visión industrial, interacción humanos-robots, inteligencia artificial, capacidad para sujetar objetos, caminar, y reconocimiento de voz.
Historial
Imagine un mundo en el que los robots de servicio le ayudan a aumentar la productividad en su trabajo, llevar las maletas al aeropuerto o, incluso, como ayuda a la tercera edad. Esta es la realidad que PAL Robotics SL en Barcelona, España, espera conseguir. Situada en el corazón del distrito tecnológico de Barcelona, a corta distancia del conocido paseo de Las Ramblas, esta innovadora compañía es pionera en el desarrollo de estos robots.
El diseño, la programación y el montaje de todos los robots se lleva a cabo en las ajetreadas oficinas de PAL Robotics en Barcelona, donde los ingenieros trabajan sin descanso para mejorar las cualidades de sus robots.
Retos
 Luca Marchionni (en la foto a la izquierda), Director Tecnológico en PAL Robotics, comenta que uno de los retos más difíciles es conseguir que mantengan el equilibrio al andar, algo que para los humanos es un movimiento normal.
Luca Marchionni (en la foto a la izquierda), Director Tecnológico en PAL Robotics, comenta que uno de los retos más difíciles es conseguir que mantengan el equilibrio al andar, algo que para los humanos es un movimiento normal.
Al caminar se generan y ejecutan simultáneamente trayectorias con muchos grados de libertad, mientras que los pies tienen que adaptarse el entorno. El sistema de control de un robot bípedo tiene que gestionar transiciones entre dos fases: el soporte doble, con los dos pies apoyados en el suelo, y el soporte individual, cuando se apoya un solo pie.
Mantener el equilibrio es una tarea complicada y, dado que empleamos cajas reductoras que introducen cierta elasticidad e irregularidad, para nosotros es muy importante conocer la posición del motor y de las articulaciones.
PAL Robotics (España)
El diseño de las leyes de control para lograrlo es complicado, debido a la irregularidad de la dinámica del robot. A menudo, no se puede realizar mediante análisis, y resulta demasiado complejo tratar de conseguirlo solo con el método de prueba y error. En su lugar, se aplica un enfoque numérico denominado optimización de trayectoria, donde se programa una ‘trayectoria óptima’ del robot y se calcula aritméticamente la mejor aproximación posible a esta; el criterio ‘óptimo’ se determina mediante un cálculo de esfuerzo-función seleccionado expresamente, que tiene en cuenta la trayectoria óptima y las limitaciones físicas del robot.
En el diseño de las articulaciones de los robots humanoides se incluyen restricciones estrictas de espacio y peso para mantener el volumen y las inercias al nivel más bajo posible; muchos de los robots de PAL Robotics tienen tamaño humano y realizan movimientos con hasta 40 grados de libertad.
Solución
 Los REEM-C y otros robots humanoides de PAL Robotics llevan juntas articuladas preparadas para realizar una serie de movimientos complejos según cada tarea. La información del encóder de alta precisión es necesaria para el servo-control del par de torsión aplicado, la velocidad y la posición de cada articulación.
Los REEM-C y otros robots humanoides de PAL Robotics llevan juntas articuladas preparadas para realizar una serie de movimientos complejos según cada tarea. La información del encóder de alta precisión es necesaria para el servo-control del par de torsión aplicado, la velocidad y la posición de cada articulación.
Renishaw asesoró a PAL Robotics sobre la selección del encóder para cada aplicación, basándose en su profundo conocimiento de las necesidades y productos del sector. Se eligió la solución de encóderes magnéticos sin contacto de RLS, empresa filial de Renishaw. Los encóderes rotatorios AksIM™ y Orbis™, se integraron en las articulaciones de la rodilla (en la foto a la izquierda), la muñeca y el codo, y el sistema RoLin™ incremental en el componente de nivelación.
La colaboración con Renishaw ha sido excelente. Lo que más nos gusta es la gran cantidad de opciones y posibilidades de adaptación a medida de cada componente. La gama de encóderes RLS incluye varias configuraciones: puede elegir entre una serie de distintos protocolos de comunicaciones, tamaños de sensores e interfaces. Cuantos más parámetros mejor, ya que siempre buscamos fabricar robots más ligeros, compactos y preparados.
PAL Robotics (España)
 Para el control del equilibrio, se implantó un sistema de información de fuerza en cada pie del robot para calcular el Punto de Momento Cero (ZMP), una métrica utilizada para evaluar la estabilidad de robots como el REEM-C. Después, el ZMP medido se introduce en un control PD de ‘lógica difusa’ para hacer un seguimiento del ZMP necesario y obtener el equilibrio y la eliminación de alteraciones. El objetivo del control es ajustar la posición del centro de masa del robot para mantener en todo momento el punto ZMP dentro del área de apoyo (debajo de los pies). Para lograr una locomoción dinámica bípeda correcta, es necesario el control preciso de los ángulos de articulación de las piernas en cuanto a la posición, velocidad y aceleración, que proporciona la información del encóder rotatorio.
Para el control del equilibrio, se implantó un sistema de información de fuerza en cada pie del robot para calcular el Punto de Momento Cero (ZMP), una métrica utilizada para evaluar la estabilidad de robots como el REEM-C. Después, el ZMP medido se introduce en un control PD de ‘lógica difusa’ para hacer un seguimiento del ZMP necesario y obtener el equilibrio y la eliminación de alteraciones. El objetivo del control es ajustar la posición del centro de masa del robot para mantener en todo momento el punto ZMP dentro del área de apoyo (debajo de los pies). Para lograr una locomoción dinámica bípeda correcta, es necesario el control preciso de los ángulos de articulación de las piernas en cuanto a la posición, velocidad y aceleración, que proporciona la información del encóder rotatorio.
Resultados
 El control del equilibro es crucial para conseguir un movimiento bípedo estable, por tanto, la información de los encóderes es fundamental para determinar la postura del robot y generar las referencias de posición, velocidad y aceleración que debe seguir cada articulación.
El control del equilibro es crucial para conseguir un movimiento bípedo estable, por tanto, la información de los encóderes es fundamental para determinar la postura del robot y generar las referencias de posición, velocidad y aceleración que debe seguir cada articulación.
Los encóderes magnéticos proporcionan a PAL Robotics una solución de medición de posición flexible que les permite cumplir los exigentes requisitos de espacio y rendimiento. La impresionante gama de prestaciones de los encóderes seleccionados aporta una libertad de diseño significativa. El control del equilibrio se consigue mediante la gestión del par de torsión instantáneo de cada junta de articulación, lo cual permite colocar correctamente las articulaciones del robot de forma que pueda caminar con estabilidad. La alta precisión del encóder reduce al mínimo los errores de señal del control, por consiguiente, este puede ajustar rápidamente las posiciones del robot para mantener en todo momento el Punto de Momento Cero (en inglés, Zero Moment Point o ZMP) dentro del área de apoyo de los pies.
Acerca de PAL Robotics
PAL Robotics diseña y fabrica robots de servicio y humanoides de alta tecnología para una multitud de aplicaciones. La empresa se fundó en 2004 por seis ingenieros que tenían un sueño. El primer robot de PAL Robotics se llamaba REEM-A y nació de un proyecto de un brazo robótico para jugar al ajedrez. Desde entonces, la cartera de productos de PAL Robotics ha ido creciendo progresivamente y, actualmente, incluye 6 modelos de robot distintos, como TIAGO, diseñado para ayudar a las personas en entornos domésticos e industriales. Otro robot, TALOS, se ha diseñado para trabajar en cadenas de producción, por ejemplo, apretando tornillos de difícil acceso y ayudando a los operarios en el manejo de herramientas pesadas.
Para obtener más información sobre PAL Robotics, visite: www.pal-robotics.com
![]()